Maiden drive of APM:Rover on RPi with Navio

Since the last update we’ve added a couple of additional pieces of code, as well as reworked some of the previous ones. Here’s the list of new features:
- Enabled external clocking for PCA9685, it should provide precise PWM values.
- Added support for ADS1115 ADC in APM.
- Added support for external GPS.
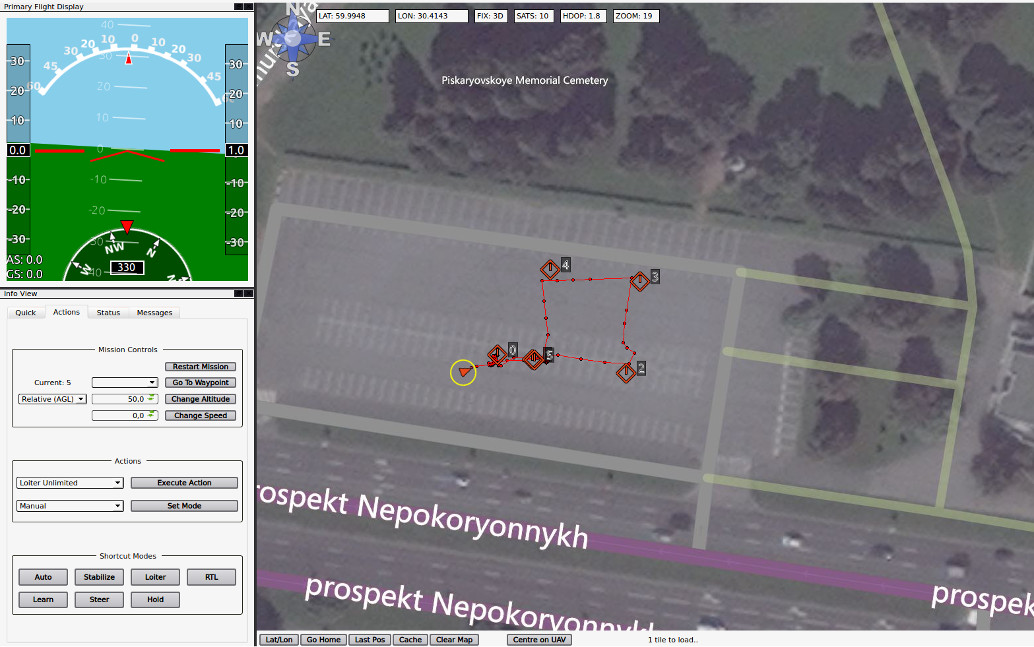
Seeing the rover finally make its first autonomous turns in an empty parking lot, even with not tuned PIDs is a large step forward in our project. Even though most of the code pieces are still in the prototype state, we hope to finalize them soon. Thanks to the APM’s HAL all drivers are the same for Rover, Plane and Copter, so the first plane flight on Raspberry Pi with Navio is not far ahead – we’ll make it as soon as we do some additional testing with the rover.